

-
Consultas
-
Seleccionar
y cotizar -
Compartir
-
Socios
Módulo Motion
Características (modo de movimiento simple)

- Feature
- Especificación
- Normas
- Discontinued


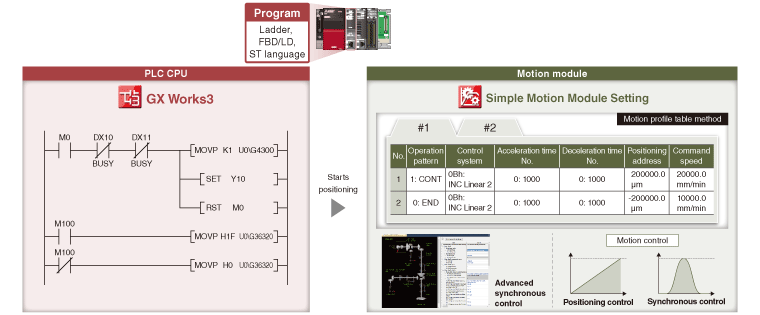
- ●Positioning control can be easily performed with motion profile tables. Synchronous control can be executed only with parameter settings.
- ●Remote devices are connected via CC-Link IE TSN and programmed from PLC CPUs.
- ●Data that is synchronized with the motion operation cycle can be collected with the digital oscilloscope. The collected data is displayed in waveforms for operation verification.
[An example of programming by a PLC CPU]
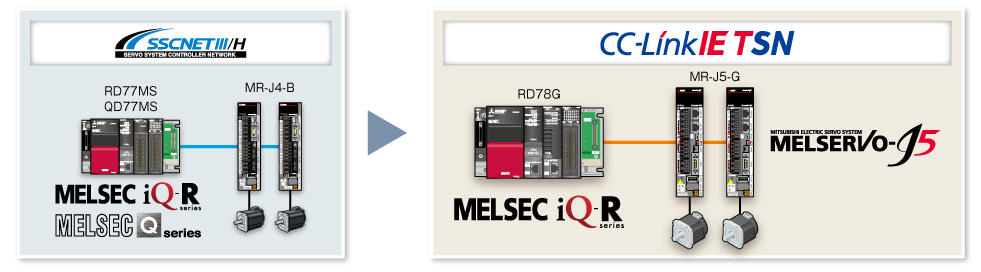
Utilización de programas existentes
Los dispositivos y programas de la serie MELSEC iQ-R/MELSEC-Q existentes son reutilizables en un nuevo sistema de módulo de movimiento RD78G que admite el modo de movimiento simple.
Línea

RD78G4
RD78G8
RD78G16
- Número máximo de ejes de control: 16 ejes/módulo (RD78G16)
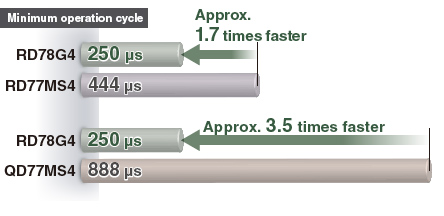
- Minimum operation cycle *1: 250 [μs]
- *1.The operation cycle varies by the number of control axes and the models.
Rendimiento mejorado
El ciclo de operación mínimo del RD78G en modo de movimiento simple es aproximadamente 1,7 a 3,5 veces más rápido que el de los modelos anteriores. Los datos de los servoamplificadores y las señales de entrada/salida pueden recibirse a altas velocidades, lo que reduce el tiempo del ciclo.
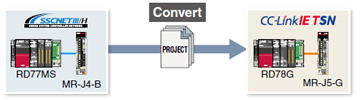
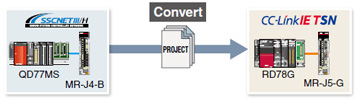
Reutilización de proyectos existentes
Los proyectos existentes de un módulo de movimiento simple pueden reutilizarse. Esto permite la reducción del tiempo de desarrollo del programa.
RD77MS→RD78G
Seleccione [Cambiar módulo] en el menú de navegación del GX Works3 para convertir el proyecto de módulo de movimiento simple en un proyecto de módulo de movimiento.
Después de la conversión, establezca los parámetros de red, los parámetros del servoamplificador y otros parámetros.
QD77MS→RD78G
Seleccione [Importar datos del módulo de movimiento simple] en el menú de navegación del GX Works3 para importar los parámetros del QD77MS.
Después de la importación, establezca los parámetros de red, los parámetros del servoamplificador y otros parámetros.
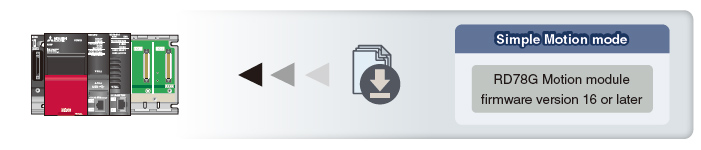
Firmware del módulo de movimiento RD78G
El RD78G admite el modo de movimiento simple con versión de firmware 16 o posterior.
Para obtener los archivos de actualización de firmware, comuníquese con su oficina de ventas local.
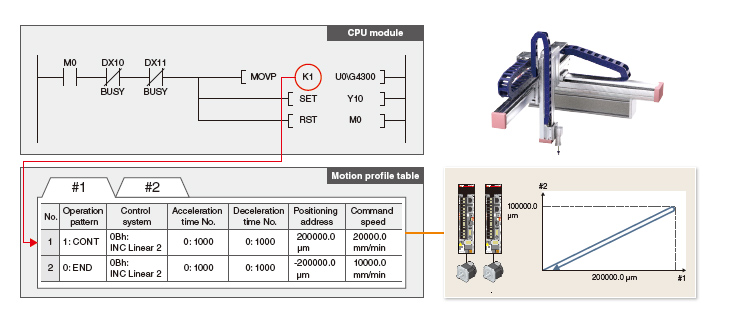
Control de posicionamiento
El control de posicionamiento se ejecuta fácilmente usando una tabla de perfil de movimiento.
- To meet various application needs, the Motion module offers various types of positioning control, such as linear interpolation, 2-axis circular interpolation, fixedpitch feed, and continuous path control.
- Positioning control can be executed easily by setting the positioning address, the speed, and other setting items in a sequence program.
- Se encuentran disponibles poderosas subfunciones, como las funciones de salida de código M, salto, cambio de velocidad y cambio de posición de destino.

Programación
El módulo Motion ejecuta fácilmente la operación de posicionamiento con la instrucción en un programa de secuencia que inicia los datos de posicionamiento de la tabla de perfil de movimiento.
Control sincrónico avanzado
El control sincrónico puede lograrse mediante software en lugar de controlarlo mecánicamente con un engranaje, un eje, un embrague, un engranaje de cambio de velocidad o una leva, etc.
- El control sincrónico de cada eje puede iniciarse/finalizarse de manera flexible, lo que permite utilizar el eje de control sincrónico y el eje de control de posicionamiento dentro del mismo programa.
- El eje de generación de comandos, el eje de servoentrada o el eje del codificador sincrónico *1 pueden establecerse como ejes de entrada.
- El eje de salida se opera con una leva. Las tres operaciones siguientes pueden realizarse con las funciones de leva: operación lineal, operación bidireccional y operación de alimentación.
- An incremental synchronous encoder *2 can be connected via servo amplifier.
- *1.Supported by MELSERVO-J5 series.
- *2.When connecting an absolute position synchronous encoder, use an encoder of HK series servo motors.
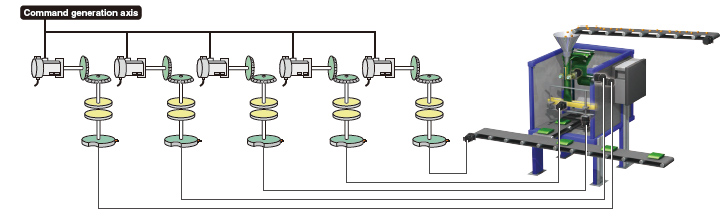
[Eje de generación de comandos]
El eje de generación de comandos es el eje que realiza solo la generación de comandos.
Se controla independientemente de otros ejes conectados a servoamplificadores (no se cuenta como eje de control).
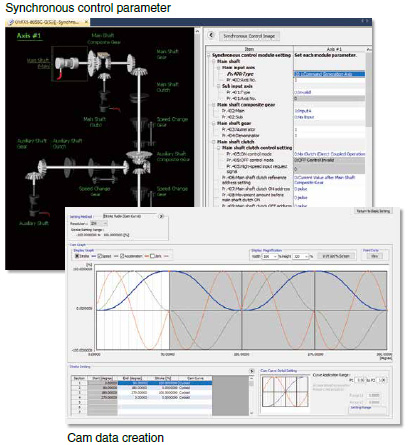
Configuraciones de parámetros
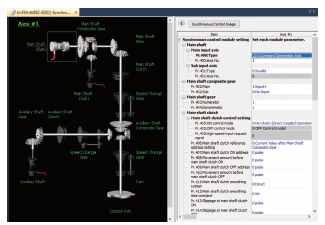
El control sincrónico se ejecuta ajustando los parámetros del eje de entrada, el eje de salida, el engranaje y el embrague para el control sincrónico y activando la señal de inicio del control sincrónico.
Cam Data (Operation Profile Data)
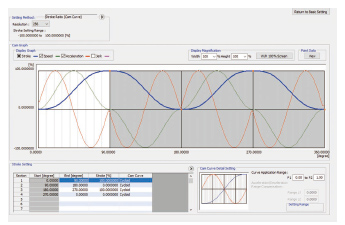
El gráfico de levas se puede crear de manera flexible y sencilla mediante la función de arrastrar y soltar. La forma de onda cambia según el movimiento del puntero.
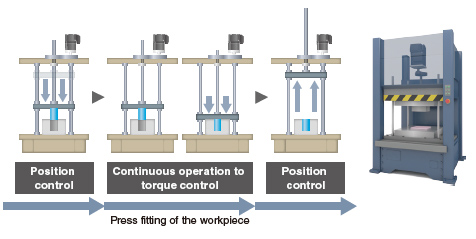
Funcionamiento continuo para el control de par
The axes are controlled to run at the constant torque by following the torque command while the current position is being trucked.
Switching from position control to torque control continuously can be performed without stopping the servo motor.
Funciones auxiliares
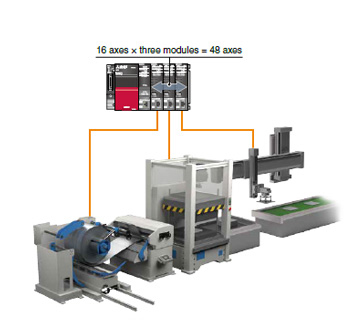
Sincronización entre módulos
La función de sincronización entre módulos puede sincronizar los tiempos de control entre varios módulos de movimiento en la misma unidad base.
Machines can be synchronized through this function when each machine uses Motion modules.
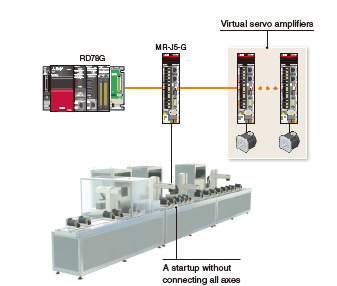
Servoamplificador virtual
La función de servoamplificador virtual permite el funcionamiento de un servoamplificador virtual como si se conectara una unidad real. Cuando el servoamplificador virtual se establece como un eje de servoentrada del control sincrónico, el módulo Motion ejecuta el control sincrónico con comandos de entrada generados virtualmente. Además, esta función se utiliza para simular un eje sin una conexión real.
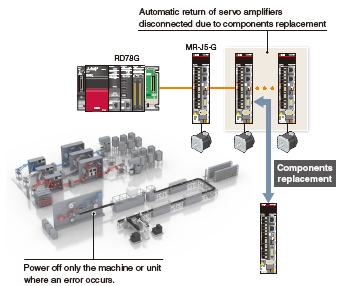
Retorno automático
When device stations are back to normal status after disconnected due to a data link error, this function automatically returns the disconnected stations to the network and restarts data link.
Parts can be replaced by turning off only the machine where an error occurred. Powering off the whole system is not required.
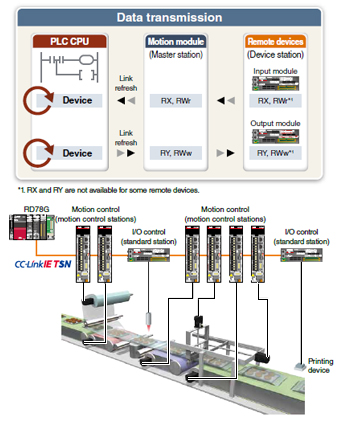
Operación de lectura/escritura de estaciones estándar
- The PLC CPU sends/receives link devices to/from standard stations (device stations other than the motion control stations) through a Motion module.
- One-to-one communication is possible between the master and device stations.
- The PLC CPU can be programmed using the signals of the device stations.
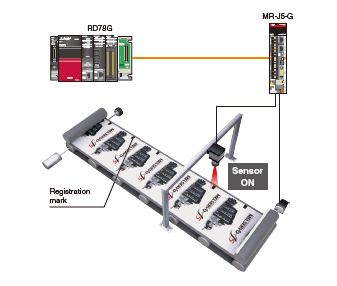
Detección de marcas
Esta función bloquea los datos que responden a una entrada de señal activadora para un servoamplicador.
La cantidad de compensación se calcula en función de los datos bloqueados, y el error se compensa mediante un eje de compensación.
A high-accuracy mark detection at 1 μs is possible.
Función de comunicación de seguridad mediante CC-Link IE TSN
CC-Link IE TSN permite el control de las comunicaciones de seguridad y las que no se relacionan con seguridad, lo que permite alcanzar un sistema flexible mediante el cual las comunicaciones de seguridad se pueden incorporar fácilmente a la red de control principal.
En el siguiente sistema que integra comunicaciones de seguridad y de otro tipo, la CPU de seguridad verifica las señales de seguridad recibidas a través del módulo E/S remoto de seguridad y envía las señales de seguridad (STO, etc.) a los servoamplificadores. La salida de señales de seguridad a través de la red elimina la necesidad de cablear las señales de seguridad a un controlador de seguridad y a un servoamplificador.
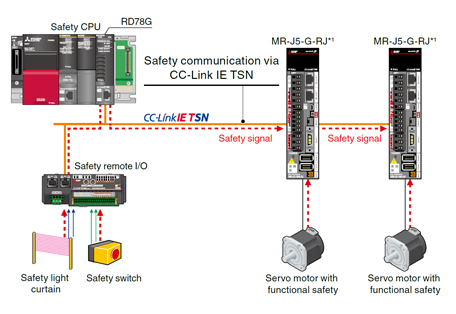
- *1.Supported by MELSERVO-J5 series.
For servo amplifiers that support the safety communication function, refer to "Safety Sub-Functions".
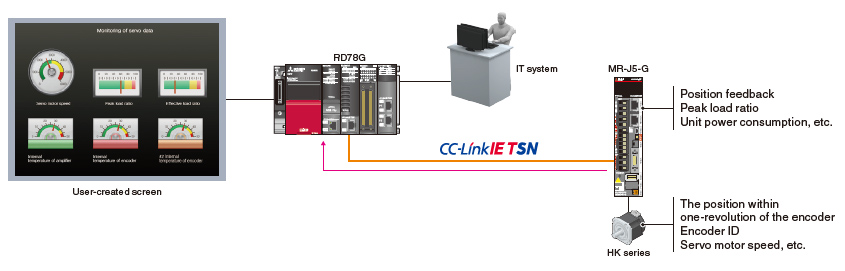
Monitor de datos opcional
La operación de los servos se monitorea con datos exhaustivos adquiridos a través de CC-Link IE TSN. Los datos adquiridos pueden transferirse al sistema de TI o transferirse y mostrarse en cualquier pantalla GOT creada por el usuario en la red. Los datos objetivo para el monitoreo se pueden cambiar de manera flexible durante el funcionamiento.
Driver Communication*1
By using the driver communication function of the servo amplifier, the master axis is controlled with the Motion module, while the following axes are controlled by data communication between servo amplifiers (driver communication) without using the Motion module.
The Motion module can drive multiple axes by controlling only the master axis.
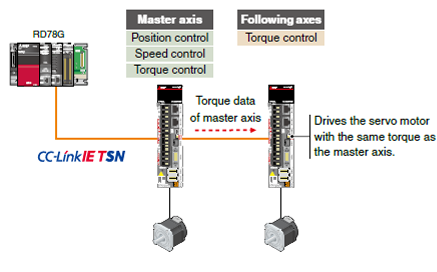
- *1.Supported by MELSERVO-J5 series.
Ingeniería ambiental
MELSOFT GX Works3 covers various aspects of development processes - parameter settings, servo adjustments, and debugging of Motion modules as well as sequence program creation. This software offers an engineering environment that provides comfortable design environment.
MELSOFT GX Works3
Various features are integrated into GX Works3, which allows users not only to easily create projects but also maintain consistency through the entire development processes.

Diseño de sistemas

- Configuración de los módulos
- Configuración de la red
- Configuración de datos para servoamplificadores
- Ajustes para E/S remotas
- Parameter conversion function
Programación (posicionamiento)

- Programación con escalera, SFC, FBD/LD
- Configuración de datos de posición
- Simulación fuera de línea, cálculo automático de la velocidad del comando
Programación (control sincrónico avanzado)
- Parámetro de control sincrónico
- Creación de datos de leva, lista de datos de leva
Depuración/mantenimiento
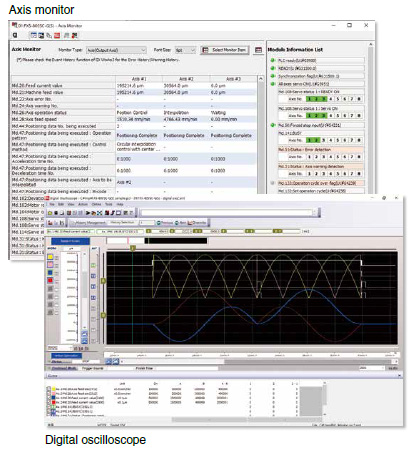
- Historial de eventos
- Historial de valores actuales, historial de inicio, monitor de eje
- Servomonitor
- Osciloscopio digital
Lista de funciones
| Módulo Motion | ||||
|---|---|---|---|---|
| RD78G16 | RD78G8 | RD78G4 | ||
| Número máximo de ejes de control | 16 | 8 | 4 | |
| Minimum operation cycle [μs]*1 | 250 | |||
| Método de conexión de servoamplificador | CC-Link IE TSN (velocidad de las comunicaciones: 1 Gbps/100 Mbps) | |||
| Servoamplificador conectable | MR-J5-G, MR-J5W-G, MR-J5D-G4 MR-JET-G |
|||
| Distancia máxima entre estaciones [m (ft)] | 100 (328,08) | |||
| Modos de control | Control de posición, control de velocidad, control de par, control sincrónico, control de leva | |||
| Control de posición | Control de posición, interpolación lineal (hasta 4 ejes), Interpolación circular (2 ejes), interpolación helicoidal |
|||
| Proceso de aceleración/desaceleración | Aceleración/desaceleración trapezoidal, aceleración/desaceleración de curva en S | |||
| Método de control de posición | Tabla de perfil de movimiento | |||
| Retorno a la posición inicial | Retorno a la posición inicial del variador*2 | |||
| Control manual | Operación JOG, operación manual del generador de impulsos, operación de avance por pulsación | |||
| Funciones auxiliares | Parada forzada, límite de carrera de hardware, límite de carrera de software, sistema de posición absoluta, función de osciloscopio digital, cambio de tiempo de aceleración/desaceleración, Inter-Module Synchronization, Target position change, Torque limit value change, cambio de velocidad, anulación, función de comunicación de seguridad CC-Link IE TSN*3 |
|||
| Funciones comunes | Driver Communication, Mark detection, Virtual servo amplifier, Event history, Optional data monitor | |||
| Ingeniería ambiental | MELSOFT GX Works3 | |||
| Número de E/S que ocupan puntos | 32 | |||
| Consumo de corriente interna de 5 V CC [A] | 1,93 | |||
| Masa [kg] | 0,26 | |||
- *1.The minimum operation cycle varies depending on the number of control axes and the model.
- *2.The home position return method set in a driver (a servo amplifier) is used.
- *3.Supported by MELSERVO-J5 series.
