

-
Consultas
-
Seleccione
& Quote -
Compartir
-
Socios
Módulo de movimiento simple
Características-RD77GF

RD77GF




Red de campo CC-Link IE
Red todo en uno

CC-Link IE Field Network - Integration of IA components on ONE single network
CC-Link IE Field Network es una red única que combina la versatilidad de Ethernet y una operación sincrónica altamente precisa para el control de movimiento. Con la red única, varios dispositivos de campo, como servoamplificadores, módulos de E/S y módulos de contador de alta velocidad, se conectan de manera flexible.
CC-Link IE Field Network permite una actualización adicional de su máquina con la configuración flexible del servosistema.
Software de ingeniería todo en uno

Cubre todos los aspectos del ciclo de desarrollo del producto: desde la configuración sencilla hasta el diagnóstico con UN SOLO software de ingeniería
Para satisfacer las necesidades de los clientes, como programación, arranque y mantenimiento sencillos, ofrecemos el software de ingeniería todo en uno como una herramienta de manipulación sencilla con diversas funciones y tecnología nuevas.
Varias tareas, como la configuración de parámetros de movimiento simple, el ajuste de servos y la depuración, así como la creación de un programa de secuencia, como un bloque de función (FB), se realizan solo con este software de ingeniería todo en uno.
Sincronización de entradas y salidas con servocontrol
Varios datos, como los valores del codificador sincrónico, los valores de tensión de la plancha y los datos de texto, se introducen y emiten de acuerdo con el ciclo de comunicación del servocomando, lo que permite una amplia gama de aplicaciones de control de movimiento.

[Un ejemplo de entradas y salidas sincronizadas con el ciclo de comunicación de comandos de un servoamplificador]
Topología de red flexible
Las topologías mixtas de estrella, línea y estrella/línea están disponibles para una configuración de red mediante el uso de un concentrador de conmutación. Una topología fácil creada solo por un cable conectado a un puerto libre del concentrador de conmutación permite añadir dispositivos de campo al sistema de manera más flexible.

Servoamplificador MR-J4-GF con CC-Link IE Field Network

- Con la función de control superior de la serie MR-J4, el MR-J4-GF admite CC-Link IE Field Network.
- Junto con el módulo de movimiento simple, se habilitan el control sincrónico avanzado y el control de interpolación.
- Hay dos tipos de modos disponibles según sus necesidades: Modo de movimiento para un amplio rango de control de movimiento, tal como posicionamiento de multieje, control sincrónico, etc., y modo de E/S para posicionamiento de un eje.
(Nota-1): El MR-J4-GF con versión de software de A4 o más reciente admite CC-Link IE Field Network Basic.
Synchronous control up to μsec precision, suitable for high-accuracy positioning

Esta configuración del sistema es adecuada para una amplia gama de controles de movimiento de alta precisión, como interpolación multieje, control sincrónico y control de velocidad-par.

[Módulo de movimiento simple]
[Módulo de movimiento]
Una alta flexibilidad que permite un control versátil con los modos de movimiento y E/S

Esta configuración del sistema permite añadir de manera flexible un solo eje para el posicionamiento a una máquina que requiere una amplia gama de control de movimiento de alta precisión, como interpolación multieje, control sincrónico y control de velocidad-par.

[Módulo de movimiento simple]
[Módulo de movimiento]
[[I/O modes]
Cubren una amplia gama de aplicaciones para el control de posicionamiento

Esta configuración del sistema permite que un solo eje para el posicionamiento se conecte de manera flexible a una estación maestra, como una CPU integrada con CC-Link IE sin el módulo de movimiento simple.

[CPU integrada con CC-Link IE]
[[I/O modes]
Estación maestra CC-Link IE Field Network
The CC-Link IE Field Network Simple Motion module covers the functionality that a CC-Link IE Field Network master/ local module provides (Note-1).
El módulo de movimiento simple puede funcionar como un módulo maestro y también está equipado con dispositivos de enlace equivalentes a un módulo maestro/local.
Esto reduce el costo del sistema porque incluye funciones tanto del módulo de movimiento simple como de un módulo maestro.
(Nota-1): Excluye la función de una estación submaestra.

â– Maximum link points per network
| Artículo | RD77GF | Módulo maestro |
|---|---|---|
| Entrada remota (RX)/Salida remota (RY) | 16 000 puntos cada uno (16384 puntos, 2000 bytes) | 16 000 puntos cada uno (16384 puntos, 2000 bytes) |
| Registro remoto (RWw, RWr) | 8000 puntos cada uno (8192 puntos, 16 000 bytes) | 8000 puntos cada uno (8192 puntos, 16 000 bytes) |
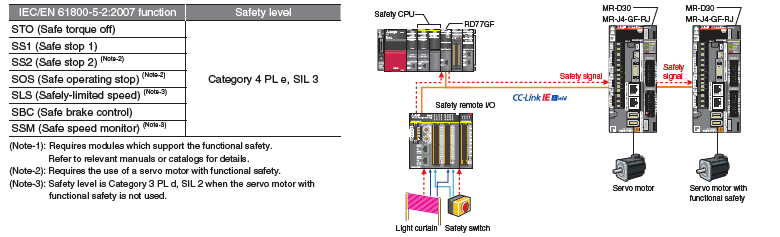
Seguridad funcional
Logro de la categoría 4 PL e, SIL 3
By wiring to MR-D30 functional safety unit (Note-1)
El nivel de seguridad es Categoría 4 PL e, SIL 3 cuando las señales de seguridad se introducen directamente a la unidad de seguridad funcional MR-D30. La función de observación de seguridad se opera en el MR-D30 mediante la configuración de parámetros y, por lo tanto, la expansión de la función de observación de seguridad es posible independientemente de los controladores.

Mediante CC-Link IE Field Network (Nota-1)
Las señales de seguridad se monitorean mediante una combinación de la CPU de seguridad y el módulo de movimiento simple RD77GF. La CPU de seguridad verifica las señales de seguridad recibidas a través del módulo de E/S remoto de seguridad y envía las señales de seguridad (STO, etc.) a los servoamplificadores. Dado que las señales de seguridad se emiten a través de CC-Link IE Field Network, no es necesario cablear las señales de seguridad a cada unidad de seguridad funcional.
Configuración de diagnóstico y parámetros
La configuración de parámetros y la recopilación de información de dispositivos de campo son posibles desde cualquier punto de conexión de la red, incluida una computadora o un dispositivo del taller.
Configuraciones de parámetros sencillas
La selección de cada dispositivo de campo en la pantalla de configuración de CC-Link IE Field mediante la función de arrastrar y soltar simplifica la configuración de parámetros.
Diagnóstico de red simple
El software de ingeniería permite a los usuarios identificar errores de red de un vistazo. Los usuarios pueden identificar al instante la causa del problema cuando ocurre, por lo que el tiempo de inactividad se acortará.

Amplio control de movimiento
Se aplica una amplia gama de controles, como posicionamiento, velocidad-par, leva y control sincrónico, a varias máquinas, como mesas X-Y, máquinas de empaque y máquinas de conversión. Seleccionar los métodos y funciones de control más adecuados para su máquina logra una solución óptima.

Control de posicionamiento (función de interpolación y control de trayectoria)
El control de posicionamiento se realiza fácilmente con una tabla de perfil de movimiento en el programa de secuencia.

- Para responder a diversas necesidades de aplicaciones, el módulo de movimiento simple ofrece varios métodos de control, como interpolación lineal, interpolación circular de dos ejes, alimentación de paso fijo y control de trayectoria continua.
- La operación automática puede ejecutarse fácilmente configurando la dirección de posicionamiento, la velocidad y otros elementos de ajuste en un programa de secuencia.
- Se encuentran disponibles poderosas subfunciones, como las funciones de salida de código M, salto, cambio de velocidad y cambio de posición de destino.
Control sincrónico avanzado
El control sincrónico avanzado es un control sincrónico basado en software como alternativa al control mecánico, como engranaje, eje, embrague, engranaje de cambio de velocidad y leva. Además, el control de levas es aún más fácil con la función de generación automática de levas. El control sincrónico puede iniciarse/finalizarse con facilidad para cada eje, lo que permite que el eje de control sincrónico y el eje de control de posicionamiento se usen dentro del mismo programa.

(Nota-1): Se requiere el MR-J4-GF-RJ cuando se usa el codificador sincrónico absoluto en serie.
FB para control de movimiento PLCopen®
Los módulos de movimiento simple y los servoamplificadores con posicionamiento incorporado se usan para ejecutar el control de movimiento. Cada dispositivo usa programación específica, por lo que el tiempo y el costo involucrados en comprender cómo funciona cada dispositivo son una carga. El FB para control de movimiento PLCopen® es una interfaz estandarizada que proporciona los siguientes beneficios:
- Carga de trabajo reducida para la programación, lo que ahorra tiempo y reduce costos.
- Las personas que no sean el diseñador del programa pueden comprender la programación, lo cual reduce el tiempo de mantenimiento.

Cumple con IEC 61131-3
GX Works3 realiza una programación estructurada como escalera y ST, lo que facilita aún más la estandarización de proyectos entre múltiples usuarios.
El programa de secuencia que usa FB se crea con la misma interfaz independientemente de si se usa el modo de movimiento o el modo de E/S.

Lista de funciones
| Módulo de movimiento simple | ||||
|---|---|---|---|---|
| RD77GF32 | RD77GF16 | RD77GF8 | RD77GF4 | |
| Cantidad de ejes de control (Virtual servo amplifier axis included) |
Hasta 32 ejes | Hasta 16 ejes | Hasta 8 ejes | Hasta 4 ejes |
| Servo amplifier connection método |
CC-Link IE Field Network (1 Gbps) | |||
| Maximum distance between stations [m(ft.)] |
100(328,08) | |||
| Connectable servo amplificador |
MR-J4-GF , MR-J4-GF-RJ | |||
| Ciclo de funcionamiento [ms] (ajustes del ciclo de operación) |
0,5, 1,0, 2,0, 4,0 | |||
| Ingeniería ambiental | MELSOFT GX Works3 | |||
| Modos de control | Control de posicionamiento, control de posición, control de velocidad, control de par, control de velocidad-par, control de leva, control sincrónico avanzado, interpolación lineal de 2 ejes/3 ejes/4 ejes, interpolación circular de 2 ejes, control de trayectoria, control de conmutación de velocidad/posición (ABS/INC), control de conmutación de posición/velocidad (INC) |
|||
| Unidad de control | mm, pulgada, grado, pulso | |||
| Datos de posición | 600 datos (datos de posicionamiento N.º 1 a 600)/eje | |||
| Acceleration/ deceleration process |
Aceleración/desaceleración trapezoidal, aceleración/desaceleración de curva en S | |||
| Control manual | Operación JOG, operación manual del generador de impulsos, operación de avance por pulsación | |||
| Funciones que modifican detalles de control |
Cambio de valor actual, función de cambio de posición objetivo, función de cambio de par, función de cambio de velocidad, función de anulación, función de cambio de tiempo de aceleración/desaceleración |
|||
| Retorno a la posición inicial método |
Driver home position return (Note-1) | |||
| Funciones auxiliares | Función de parada forzada, función de límite de carrera de hardware, función de límite de carrera de software, sistema de posición absoluta, función de operación sin amplificador, alimentación de longitud ilimitada, función de monitor de datos opcional, función de detección de marcas, copia de seguridad de memoria flash ROM, función de salida de código M, función de historial de eventos, función de osciloscopio digital, función de generación automática de levas |
|||
| Number of occupied I/O puntos |
64 puntos (asignación de E/S: Intelligent function module, 64 puntos) |
32 puntos (asignación de E/S: Módulo de funciones inteligentes, 32 puntos) | ||
| 5VDC internal current consumption [A] |
1,1 | |||
| Masa [kg] | 0,23 | |||
- (Nota-1):
- Se utiliza el método de retorno a la posición inicial establecido en un variador (un servoamplificador).
